GE423 Final Project - Team 71
Chris Askland, Wiley Jones, Ryan Clancy, Jason Lee
Chris Askland, Wiley Jones, Ryan Clancy, Jason Lee
The robot uses a modified A* algorithm for path planning, which finds the shortest path length between two points that are passed to the robot. The A* algorithm is passed the robot’s instantaneous location and end location. The robot is required to stop, in order, at 5 different waypoints. The robot’s instantaneous position is determined using a combination of the OptiTrack Motion Capture system and motor encoder and gyroscope readings. All positioning data is sent to and plotted in a LabView program. The basic A* algorithm was improved by adding in diagonal path planning. Diagonals are longer, so a cost function was added to a diagonal path such that the robot would still plan the shortest route. Along its path, the robot needs to pick up at least two colored balls.
Obstacles are detected using the LADAR mounted on top of the robot car. If the
robot detects an object 5 times within .2 tiles of a grid point, it marks it as
an obstacle in the map that is passed to the A* algorithm. After an obstacle is
detected, the A* algorithm is called again, and the robot will know to avoid the
obstacle. The robot can detect objects in a 180-degree sweep. The robot’s
greatest strength is the accuracy and tuning of its obstacle detection.
Due to
the strength of the obstacle detection, little work was necessary for obstacle
avoidance. For obstacle avoidance, the robot uses the front readings from the
LADAR. If the robot is too close to a front wall, it will back up until it’s in
a more ideal position. Obstacle avoidance is necessary so the robot doesn’t
drive into a wall while trying to pick up a ball.
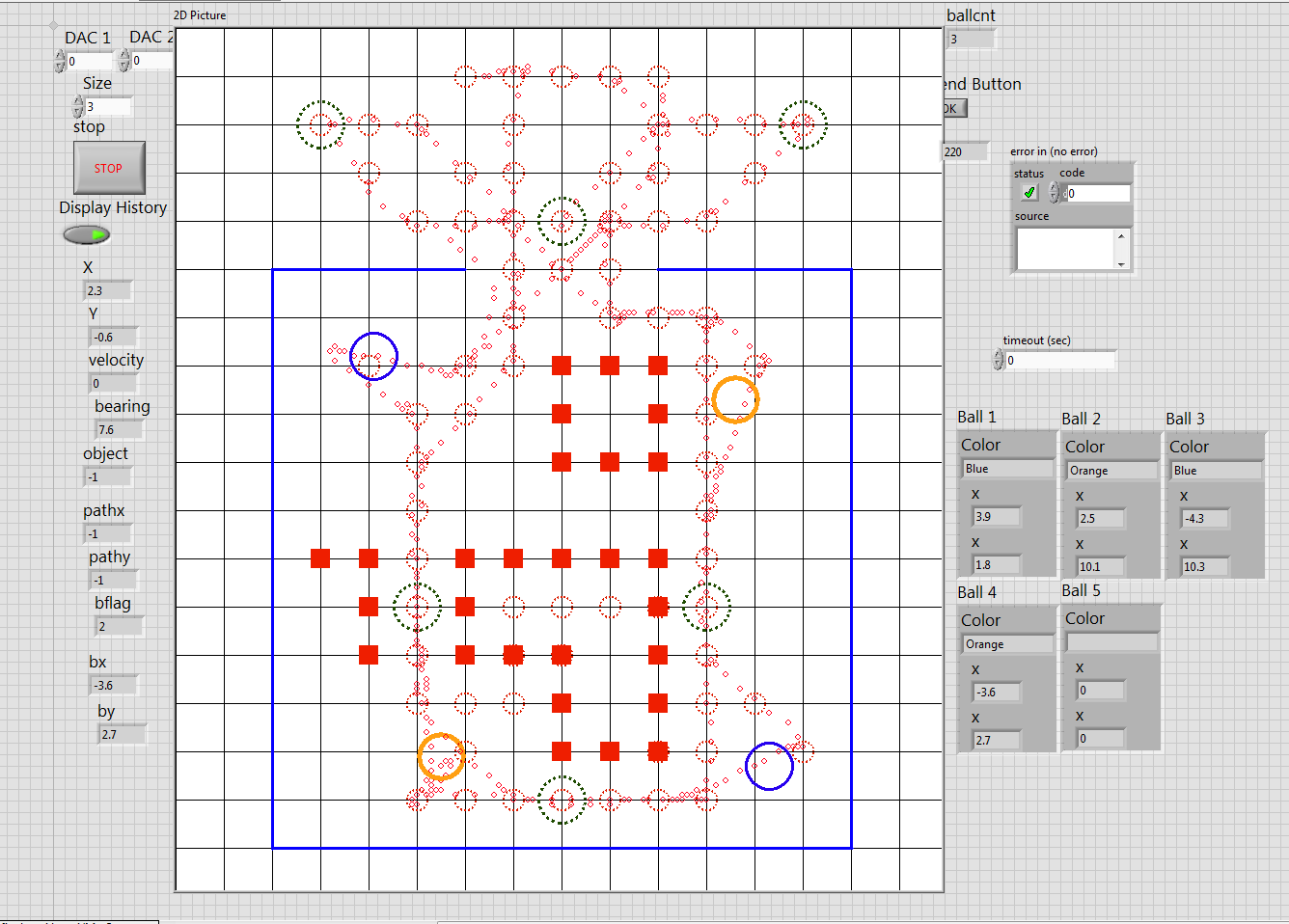
LabView Interface
The ball capturing design utilizes two lift gates, each connected to a servo. An
advantage of this system is the large opening for the golf balls to be picked.
Furthermore, it was easy to implement and adjust. Each lift gate is used to
collect all of a single-color ball.
A camera mounted to the front of the robot
was used to capture image data. The image was converted to the HSV color space
and analyzed to detect blue and orange golf balls. The algorithm uses blob
detection to detect multiple balls at once. However, the robot will choose to
pick up the ball closest to the camera. A proportional control is used to steer
the robot towards the balls. The location of each ball is recorded by the robot
and set to a LabView program.
The source code that runs on the robot is available on Github.